

核电站无人机室内自主巡检研究
引 言
室内环境无全球定位系统(Global Positioning System,GPS)信号,无人机需依赖定位系统如超宽带( Ultra Wide Band,UWB)等,但此类外部设备部署烦琐。在确保飞行安全的前提下,无人机需在无障碍物且路径最短的原则下自主导航,此项工作极具挑战性。在障碍物密布的室内,规划并执行动态、可行轨迹尤为复杂,要求无人机高度灵活,既能迅速调整主路径以规避障碍,又能满足动态环境约束。因此,开发适用于室内环境的无人机自主导航技术,实现高效、安全的路径规划与避障,是当前研究的热点与难点。
近年来,无人机室内自主巡检领域的研究取得了显著进展,众多学者致力于探索和优化这一技术。戴永东等提出一种利用单摄像头实现无人机在输电线路自主导航的新方法,利用输电线路之间的图像宽度来寻找最宽的无障碍空间,提高巡检效率[1]。然而,这种方法在处理复杂室内环境中的动态障碍物时存在局限性。张欣等探讨基于微型激光雷达的无人机智能化电力线路巡检技术,利用激光雷达的高精度测距能力来实现精确的障碍物检测和避障[2]。这种方法的优点在于其高精度和实时性,能够有效应对复杂环境中的挑战。然而,激光雷达的成本相对较高,且在多尘或雾霾环境中性能可能受到影响,限制了其在某些场景下的应用。
文章以某核电站为例,利用无人机具备的自主飞行、高效数据采集与分析等能力,开展无人机室内自主巡检方法的设计研究。
核电站无人机飞行信号采集
考虑到核电站的复杂性和安全性要求,无人机需要能够精确控制其飞行姿态,并有效采集关键信号[3]。利用上升沿与下降沿窗函数进行信号处理,可以帮助无人机更准确地识别和处理来自传感器的数据,从而优化其飞行控制。此过程如图 1 所示。
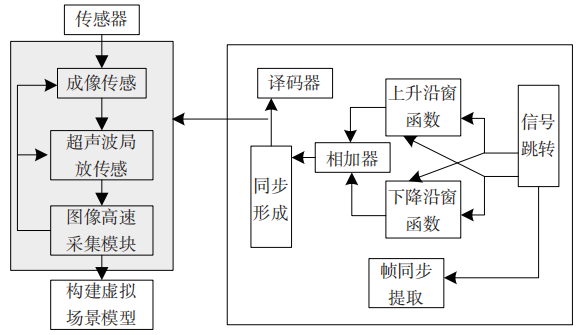
图 1 无人机飞行自适应控制过程
图 1 中,上升沿窗函数用于检测信号从低电平跳变到高电平跳的瞬间,而下降沿窗函数则用于检测从高电平跳变到低电平跳的瞬间。函数表达式为
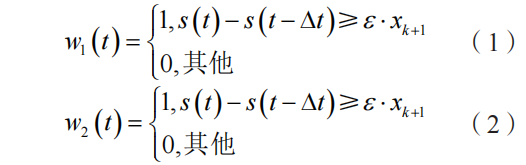
式中:w1(t) 表示上升沿窗函数;w2(t) 表示下降沿窗函数;t表示时间点;s表示信号值;∆t表示采样间隔;表示检测阈值;xk+1表示第k+1个离散序列样本点。在核电站室内环境中,GPS信号无法穿透建筑物,因此无法直接使用GPS进行位置采集,可以引进惯性导航系统,结合加速度计、陀螺仪和磁力计等传感器,计算位置、速度和姿态等参数信号。以速度参数为例,其计算公式为

式中:h表示速度参数;h表示期望值。在实际应用中,由于加速度计存在偏差和噪声,直接积分会导致误差累积。因此,通常使用卡尔曼滤波估计位置和速度,在考虑传感器偏差、噪声和其他不确定性等因素的基础上,采集无人机信号。
自主巡检与目标对象测距
在室内自主巡检背景下,无人机与目标对象测距的目的在于实现精确导航、数据收集、安全监控、故障检测、路径规划优化以及应急响应等多重功能。通过准确测量无人机与目标对象之间的距离,可以确保无人机在复杂环境中安全、高效地执行巡检任务,避免与障碍物发生碰撞,同时收集关键数据,以支持后续的分析和决策。
这一过程不仅提升了巡检的精确性和效率,还增强了无人机在高风险环境中的安全监控能力,为及时发现和响应潜在问题提供了技术保障。因此,自主巡检与目标对象测距是确保无人机在室内环境中顺利完成任务的关键环节。利用无人机集的反馈信号,结合激光距离,进行核电站无人机室内自主巡视。巡视过程中,通过发射声波脉冲并测量其返回时间,计算巡检目标对象与无人机之间的距离。计算公式为

式中:d表示目标对象的距离;v表示声波在介质中的速度(在空气中约为343 ms-1,会随温度和压力变化);K表示比例校正系数。在已知相机内参和对象在图像中大小的基础上,使用单目相机和已知的对象尺寸进行比例计算。假设已知核电站室内中巡检对象在环境中的高度和在图像中的高度(以像素为单位),则可以使用相似三角形原理,对上述计算结果进行补充,实现对巡检目标对象的精确定位。此过程可以表示为

式中:D表示巡检目标对象的精确定位;表示镜头的畸变系数;H表示相机的焦距;f表示势场函数。在上述内容的基础上,考虑环境因素(如光照条件、温度、湿度等)对测距结果的影响,并进行相应的校准和补偿。按照上述步骤,实现自主巡检与目标对象测距。
核电站无人机室内自主巡检实现
无人机在室内巡航时,面对非可靠路径的威胁规避问题,需要结合感知系统提供的信息和决策系统,判断障碍物的威胁程度,并据此规划避障路径[4]。在威胁评估阶段,无人机会根据感知到的障碍物信息(距离、速度、高度差等),计算室内巡航非可靠路径的威胁度。在此过程中,根据障碍物与无人机的相对距离,计算无人机室内巡航非可靠路径威胁程度,计算公式为

式中:C表示非可靠路径威胁程度;A表示障碍物与无人机的相对距离;B表示相对速度;Amax表示最大相对距离;Bmax表示最大相对速度;、表示权重系数,用于调整距离和速度在威胁度计算中的影响。在路径规划阶段,无人机需要根据威胁程度以及当前位置,规划避障路径[5]。此过程中,在任务空间为障碍物和目标点构建势场。障碍物产生斥力场,目标点产生引力场。在无人机的当前位置计算势场的梯度,该梯度指向势场降低最快的方向。计算公式为

式中:x表示无人机在当前位置的梯度;k表示第k步;a表示学习率(步长)。根据梯度方向更新无人机的位置,直到达到目标点或满足其他停止条件。按照上述步骤,完成无人机室内巡航非可靠路径威胁规避的设计。
以规避路径为基础,对于姿态估计(即确定无人机的方向),通常会使用陀螺仪和磁力计的数据,并通过四元数或欧拉角等表示法进行更新。计算公式为

式中:Z表示无人机的方向与姿态估计值;表示更新系数。按照上述方式,完成核电站无人机飞行自适应控制。
对比实验
为检验该方法的应用效果,选择某试点核电站进行实验。其室内构成复杂,包含多个反应堆厂房、辅助设备间及燃料储存区,总面积超过10万m2,内部通道狭窄且障碍物众多。据统计,该核电站内部有超过5000个关键设备点需定期巡检,现有人工巡检需耗时数周,且难以保证全面覆盖。
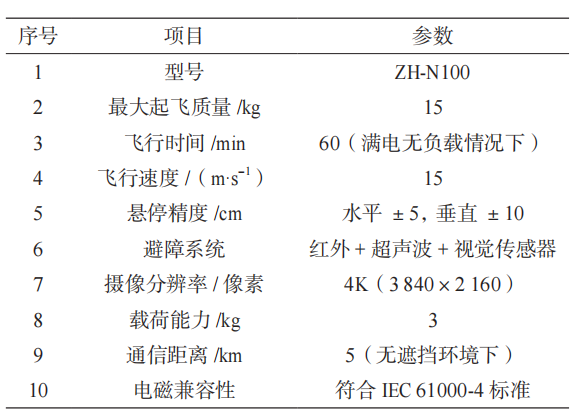
试点核电站无人机室内自主巡检的实施过程中,避障能力显著不足。由于室内环境复杂多变,无人机在自主飞行时难以准确识别并规避所有障碍物。初步测试数据显示,无人机在避障测试中的误判率高达5%,导致多次发生轻微碰撞事件,影响了巡检任务的顺利进行。碰撞不仅可能损坏无人机本身,还可能对核电站内的设备造成潜在威胁,增加安全风险。针对现有问题,应用文章设计的方法,进行室内的自主巡检设计。无人机选型与技术参数如表 1 所示。
表 1 无人机选型与技术参数
在此基础上,引进文献[1]提出的基于改进蚁群算法的巡检方法、文献[2]提出的基于微型激光雷达的巡检方法,将其作为对照方法,绘制核电站室内环境二维平面图。使用 3 种方法,进行室内自主巡检的无人机飞行路径规划,将其作为检验设计方法应用效果的关键指标,结果如图 2、图 3、图 4 所示。
通过对图 2、图 3、图 4 的详细分析,可以清晰地观察到,在 3 种不同的方法中,只有采用文章所设计的方法进行室内自主巡检,才能在确保无人机遍历所有巡检对象的同时,有效规避空间内的障碍物。这一结论在实验结果中得到了充分的验证,显示出文章方法在路径规划和障碍物避障方面的优越性。相比之下,文献[1]和文献[2]提出的方法在无人机室内自主巡检路径规划方面存在明显的局限性。这些方法未能充分考虑空间中障碍物的复杂性和多样性,导致在实际应用中无法有效躲避所有障碍物。
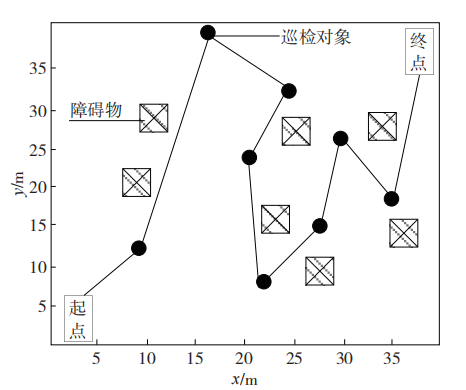
图 2 文章方法设计的无人机室内自主巡检路径
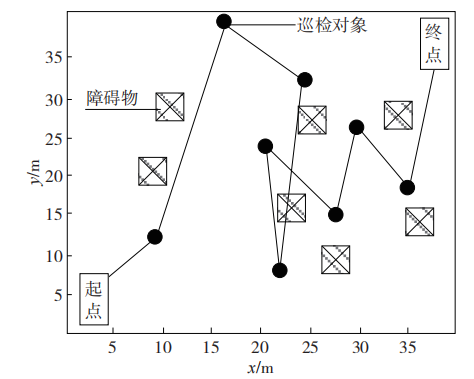
图 3 文献[1]方法设计的无人机室内自主巡检路径
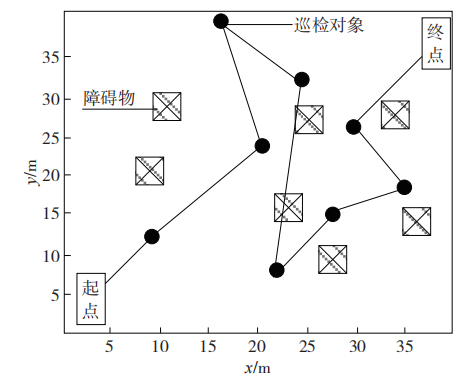
图 4 文献[2]方法设计的无人机室内自主巡检路径
综上所述,文章设计的方法不仅在理论上合理,而且在实际应用中展现出良好的效果。该方法能够满足室内自主巡检的严格需求,确保在规划巡检路径时对空间中障碍物的有效躲避。这一成果为无人机在复杂室内环境中的安全高效巡检提供了有力的技术支持,具有重要的实际应用价值。随着技术的进一步完善和优化,文章设计的方法将在未来的室内巡检领域发挥更加关键的作用。
结 语
文章针对核电站室内巡检的特殊需求,设计一套无人机室内自主巡检方法。该方法通过精确计算障碍物的威胁度,实现了对非可靠路径的有效规避,确保了无人机在复杂室内环境中的安全飞行。利用上升沿与下降沿窗函数进行信号处理,实现了无人机飞行自适应控制与信号采集的优化,提高了系统的响应速度和稳定性。结合激光测距技术,进一步提升了无人机对目标对象的测距精度,确保了巡检数据的准确性。通过对比实验,验证了所设计方法的有效性。实验结果表明,该方法不仅能够确保无人机经过所有巡检对象,还能精准避障障碍物,满足了室内自主巡检的高标准要求。文章为核电站等高风险环境下的室内巡检提供了一种可靠、高效的解决方案,具有重要的实际应用价值和推广前景。
资讯来源:
免责声明: 本站内容转载自合作媒体、机构或其他网站的信息,转载此文仅出于传递更多信息的目的,但这并不意味着赞同其观点或证实其内容的真实性。本站所有信息仅供参考,不做交易和服务的根据。本站内容如有侵权或其它问题请及时告之,本网将及时修改或删除。凡以任何方式登录本网站或直接、间接使用本网站资料者,视为自愿接受本网站声明的约束。
