

储能系统的参数自适应改进VDCM控制策略
据能源圈了解到,
摘 要 在独立运行直流微电网中,由于接入大量电力电子变换装置,系统惯性较低,阻尼较小,系统稳定性较差,同时,新能源和负载的功率波动将引起母线电压波动,严重时会影响直流微电网的稳定运行。为增强系统惯性,本文研究基于参数自适应改进虚拟直流电机(virtual DC motor, VDCM)控制策略,提升母线电压暂态稳定性。介绍虚拟直流电机控制原理,建立储能控制系统的小信号模型,深入分析虚拟转动惯量、阻尼系数和电压调节器比例、积分参数对系统稳定性影响,以及母线电压波动过程中各波动阶段对参数大小的需求。在此基础上,建立虚拟转动惯量、比例系数和积分系数与母线电压偏差的函数关系式。根据电压偏差动态调节VDCM和电压调节器参数,缩短电压的扰动恢复时间的同时减小电压波动。通过搭建的RTDS和RCP硬件在环实验系统,验证所提控制策略的正确性与可行性。
关键词 直流微电网;储能控制;参数自适应;虚拟直流电机;硬件在环实验
近年来,由于能源短缺与环境污染问题日益严重,以及“碳达峰、碳中和”目标的提出,新能源的开发与利用变得越来越重要。以光伏、风电等新能源发电为主的微电网系统得到快速发展,其中,直流微电网因无需考虑无功、频率、相位等问题,已经成为国内外研究的热点。光伏、风电等可再生能源以及电力电子变换器接入直流微电网,导致系统缺乏惯性支撑。直流微电网内的风光微电源发电具有波动性与不确定性,以及负载功率扰动会对直流母线电压造成较大影响,不利于直流微电网的稳定运行。储能系统起着平衡微电网内部功率、维持母线电压稳定的作用,通常需要对储能接口变换器进行控制以提升整个直流微电网的电能质量和供电可靠性。
针对直流微电网低惯性的问题,国内外学者进行了大量研究。文献[9]提出储能接口变换器采用虚拟直流电机控制,在电压外环与电流内环之间引入虚拟直流电机控制,控制储能DC/DC变换器具有直流电机的特性,从而稳定直流母线电压。文献[10]以Buck变换器为研究对象,建立虚拟直流电机的小信号模型,分析转动惯量与阻尼系数对系统稳定性的影响,在此基础上研究了参数自适应VDCM控制策略,但没有考虑调节器参数对电压暂态特性的影响。文献[11]根据母线电压波动变化下对惯性和阻尼需求,提出了惯量、阻尼参数自适应控制策略,并采用阻抗比判据分析了虚拟直流电机参数对稳定性的影响。文献[12]根据功率波动、母线电压变化率及电压大小情况,采用反正切函数自动调节VDCM的虚拟惯性及阻尼系数。文献[13]提出一种新型虚拟直流电机控制策略,在虚拟直流电机控制策略的基础上引入扩张状态观测器,用于估计并补偿系统功率扰动,从而减小母线电压波动。文献[14]研究了一种基于虚拟直流电机的多变换器并联协调控制方法,采用功率下垂与VDCM相结合的方法实现功率分配。文献[15]研究一种直流微电网并网逆变器的虚拟惯量和阻尼参数自适应控制策略,减小扰动下直流母线电压波动。文献[16]研究加入微分环节的改进虚拟直流电机控制,加快系统响应。文献[17]研究采用模型预测控制求解各控制单元的虚拟惯性系数,滚动优化参数,提高直流电压的稳定性。文献[18]提出了在储能系统控制中引入类虚拟同步发电机的虚拟惯性控制,分析了各参数的物理意义及选取方法,增强系统惯性。文献[19]在混合储能分频控制中引入VDCM技术的基础上,加入与辅助调压功率和超级电容荷电状态相关的调节因子,自适应优化其工作状态。文献[20]提出一种基于模型预测控制(MPC)的辅助功率虚拟直流电机(MPC-APVDCM)控制策略,建立电压预测模型与目标优化函数实现控制的主动预测调节。文献[21]提出了基于模糊控制的转动惯量自适应控制策略,设计了基于母线电压变化率、光强变化率与转动惯量的模糊规则表。文献[22]采用比例积分前馈的新型控制策略,通过比例前馈系数、积分反馈系数、积分系数实现对虚拟惯性的多维度控制。文献[23]提出简化的虚拟直流电机控制方法,使控制系统的参数更易调节。文献[24]提出了转动惯量自适应控制方法,并给出参数自适应调节原则。文献[25]以电感电流为反馈量在传统下垂控制的基础上引入VDCM环节,增强系统阻尼,降低功率波动对系统稳定性的影响。
上述文献中对虚拟直流电机控制进行了不同的改进与优化,与传统虚拟直流电机控制相比,更大程度上提高了系统的稳定性。但目前对虚拟直流电机的控制方法中,多采用在虚拟直流电机控制策略中引入模糊控制、模型预测控制,以及参数自适应等其他控制策略加强系统惯性。针对虚拟直流电机参数自适应控制策略,目前研究中,主要对转动惯量J与阻尼系数D进行自适应研究,未提及电压外环调节器比例系数与积分系数自适应控制策略,根据控制理论,在独立运行直流微电网系统受到功率扰动后恢复稳定时,电压外环调节器参数起着重要作用。基于此,本文在研究转动惯量与阻尼系数自适应变化的同时,充分研究了电压外环调节器参数变化时对减小母线电压波动的影响,提出了基于参数自适应改进VDCM的储能系统控制策略,根据直流母线电压的变化情况,自适应同时调节电压PI调节器参数和虚拟转动惯量,提高光伏和负载功率扰动下直流电压的暂态性能。
1 虚拟直流电机控制策略
1.1 虚拟直流电机工作原理
储能接口变换器采用双向DC/DC变换器,可等效为一个二端口网络,低压侧接锂电池储能装置,高压侧接公共直流母线。等效的二端口网络与直流电机的等效模型具有一定的确定关系,可模拟直流电机所具有的特性。
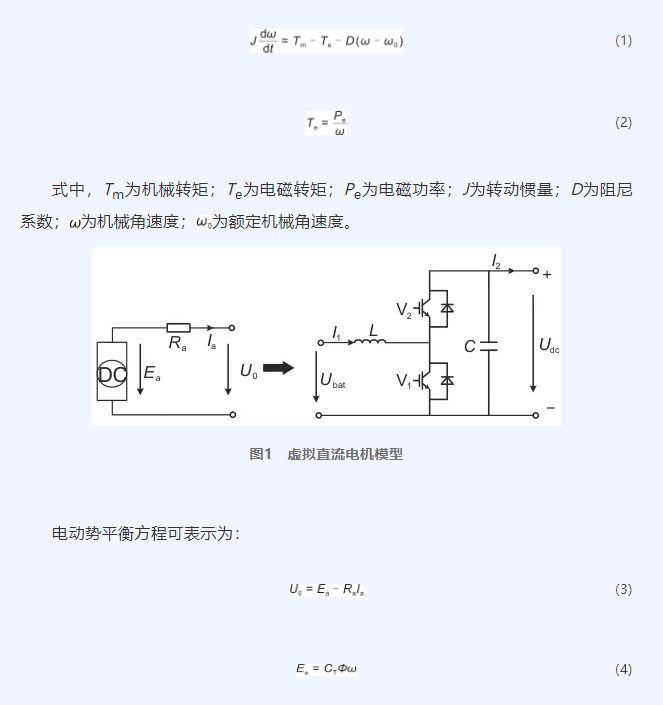
虚拟直流电机模型如图1所示。其中,Ea为直流电机电枢电动势;Ra为电枢回路等效电阻;U0为电枢电压;Ia为电枢电流;Ubat为储能单元输出端口电压;Udc为直流母线电压;I1为DC/DC变换器输入电流;I2为DC/DC变换器输出电流。
1.2 储能单元的虚拟直流电机控制策略
储能单元的双向DC/DC变换器采用虚拟直流电机控制,可使DC/DC变换器具有直流电机的惯性与阻尼特性,从而减小扰动下母线电压的波动。储能系统的VDCM控制策略框图如图2所示,Udc-ref为直流母线电压给定值。在电压外环与电流内环之间引入虚拟直流电机控制,电压外环的输出机械功率Pm作为虚拟直流电机控制的输入,虚拟直流电机控制的输出Iref作为电流环的输入。最后,由电流环输出占空比与载波进行比较,输出控制信号,对储能系统的DC/DC变换器进行控制。

图2 基于VDCM的储能控制框图
1.3 系统小信号等效模型
虚拟直流电机控制策略的小信号等效模型如图3所示。其中,ΔUdc-ref为直流母线电压给定值;ΔUdc为直流母线电压实际值;ΔiL为电感电流小扰动量;L为滤波电感;C为滤波电容。

图3 控制系统小信号模型
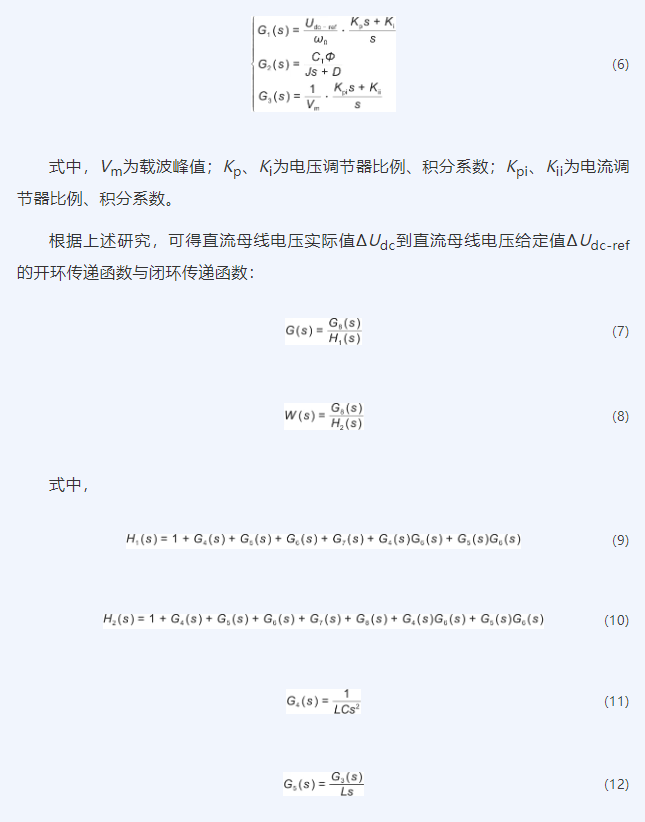
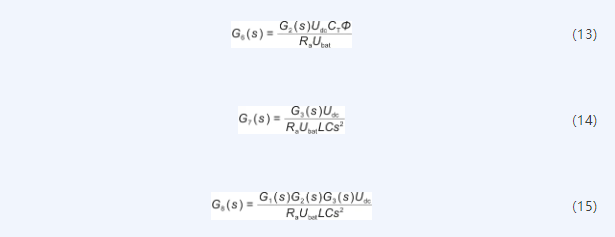
G1(s)、G2(s)、G3(s)可用公式(6)表示:
1.4 参数对系统稳定性影响分析
根据上述小信号模型,绘制伯德(Bode)图,分析虚拟直流电机控制策略中J、D、Kp、Ki对系统稳定性的影响。
(1)J和D对系统稳定性的影响
在Kp=8、Ki=1000、D=5时,绘制J=0.001、0.01、0.05、0.1时的伯德图,如图4(a)所示。J从0.001到0.1由小到大变化时,J的主要影响在伯德图的高频段,幅值裕度随J的增大而增大,系统稳定性得到提升。
在Kp=8、Ki=1000、J=0.02时,绘制D=1、5、10、15时的伯德图,如图4(b)所示。D从1到15由小到大变化时,D的主要影响在伯德图的低频段,相角裕度随D的增大而增大,增强了对扰动信号的抑制作用。
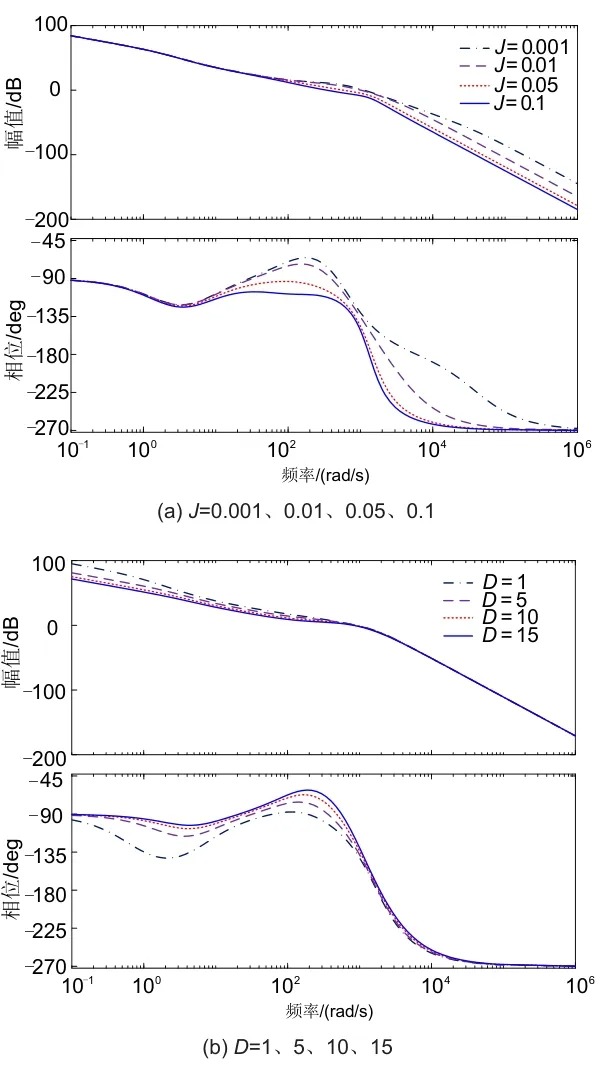
图4 不同J与D下VDCM控制的Bode图
(2)Kp、Ki对系统稳定性的影响
在Ki=1000、J=0.02、D=5时,绘制Kp=5、10、15、20时的伯德图,如图5(a)所示,Kp从5到20由小到大变化时,Kp的主要影响在高频段,相角裕度随Kp的增大而增大。
在Kp=8、J=0.02、D=5时,绘制Ki=500、1000、1200、1500时的伯德图,如图5(b)所示,Ki从500到1500由小到大变化时,Ki的主要影响在低频段,幅值裕度随Ki的减小而增大。
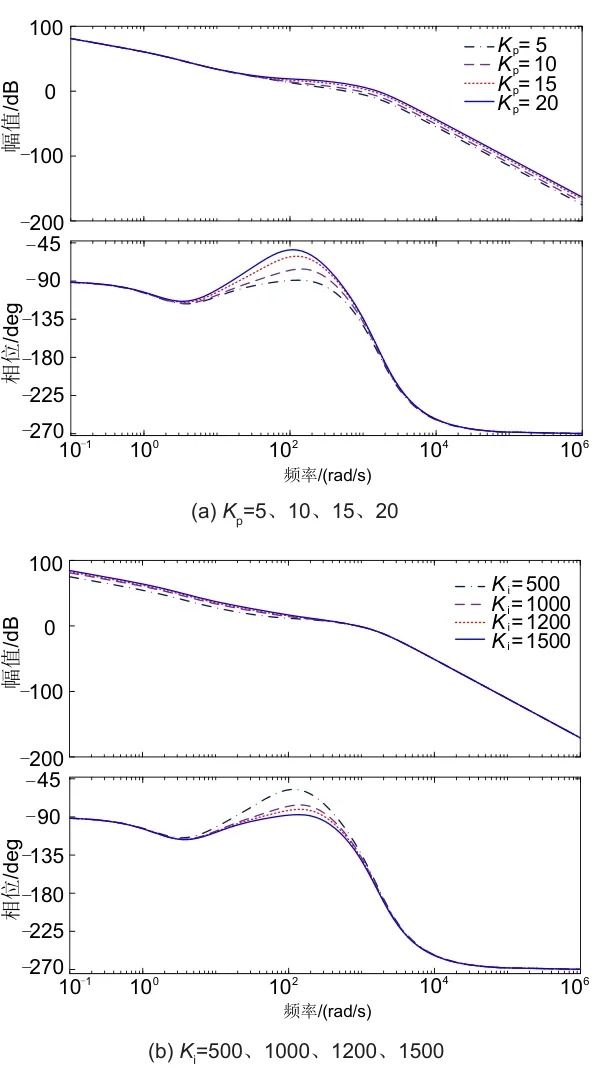
图5 不同Kp与Ki下VDCM控制的Bode图
在独立运行的直流微电网中,储能单元接口变换器的控制环节引入VDCM控制,并通过选择合理的转动惯量J与阻尼系数D以及电压外环比例系数Kp与积分系数Ki,能够提高系统运行的稳定性。
2 基于参数自适应的改进虚拟直流电机控制策略
2.1 参数变化对母线电压的影响
在实际应用中,对于直流母线电压,既希望实现较快的动态响应速度,又希望能够提供一定的惯性和阻尼支撑以减小直流母线电压的变化幅度,但传统VDCM控制在参数选择上较为模糊,不能同时满足上述要求,具有一定的局限性。针对该问题,本文研究虚拟直流电机参数自适应控制,目前研究只针对转动惯量J与阻尼系数D进行自适应控制,但经过大量仿真,J与D自适应控制对母线电压波动改善效果并不明显,对此,在基于J与D自适应控制的基础上,对电压外环比例系数Kp与积分系数Ki进行自适应控制。
分别对光伏或负载扰动引起母线电压跌落和上升进行了仿真,通过比较参数变化的仿真结果,分析J、D、Kp、Ki变化对母线电压波动影响。
(1)转动惯量
在D、Kp、Ki取值相同条件下,J=0.001, 0.01、0.05、0.1的仿真波形如图6所示。从母线电压波形仿真结果可以得出,转动惯量J越大,母线电压波动越大,但响应时间越短。
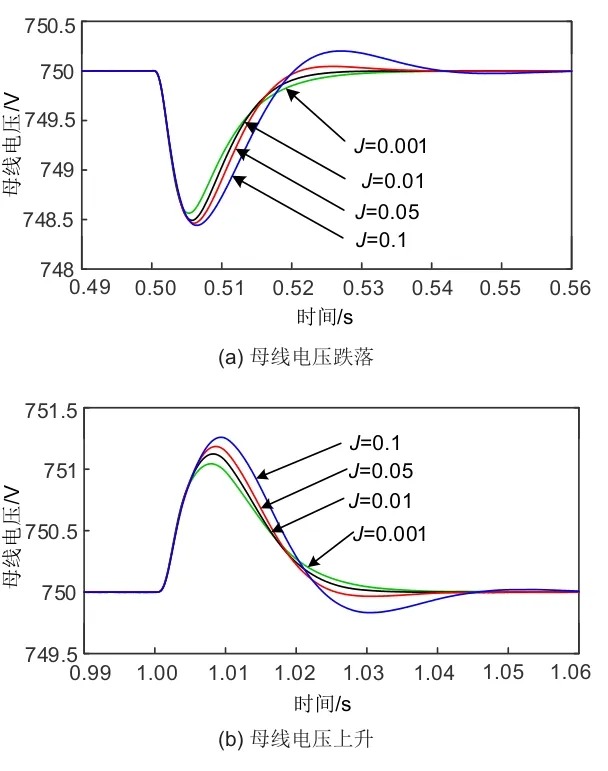
图6 J对母线电压波动影响
(2)阻尼系数
在J、Kp、Ki取值相同条件下,D=1、5、10、15时分别进行仿真,波形如图7所示。可以得出,阻尼系数D越大,恢复时间越长,母线电压波动幅值基本没有变化,D取不同值时,母线电压恢复时间变化范围较小。
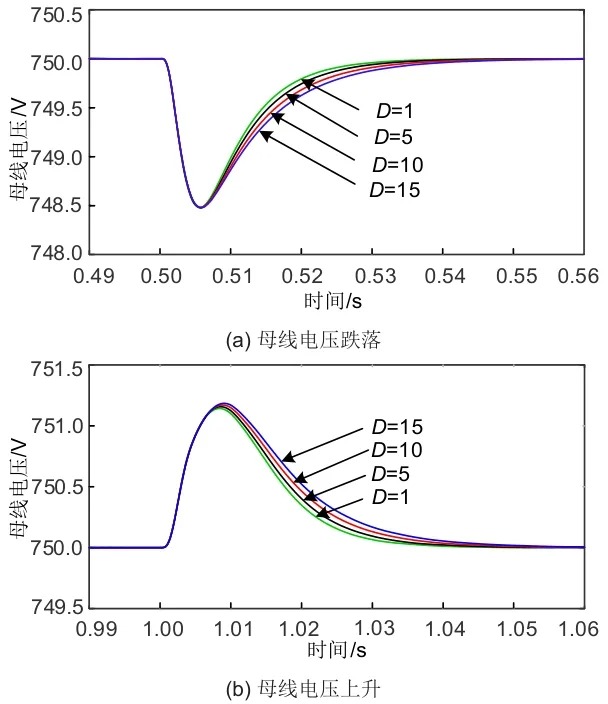
图7 D对母线电压波动影响
(3)比例系数
在J、D、Ki取值相同条件下,Kp=5、10、15、20时分别进行仿真,波形如图8所示。由图8可以得出,电压外环比例系数Kp越大,母线电压波动越小,恢复时间越长。Kp取不同值时,母线电压波动幅值与恢复时间变化较为明显。
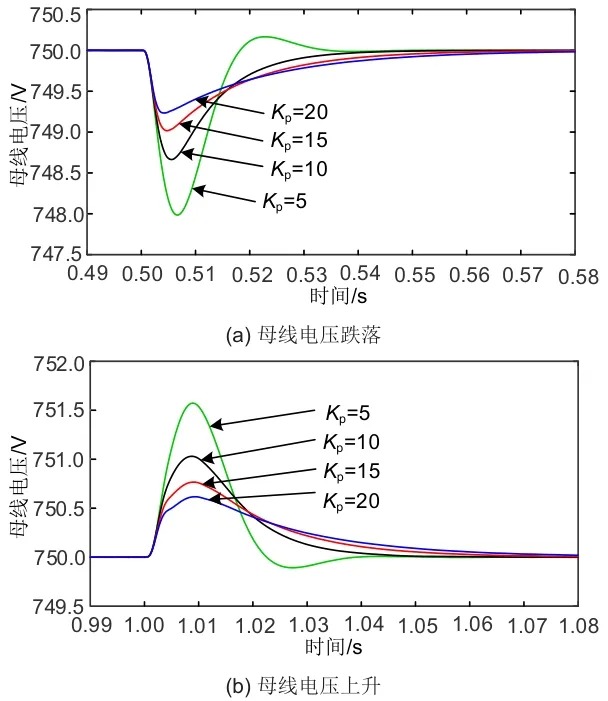
图8 Kp对母线电压波动影响
(4)积分系数
在J、D、Kp取值相同条件下,Ki=500、1000、1200、1500时分别进行仿真,波形如图9所示。从电压波形可以得出,电压外环积分系数Ki越大,母线电压波动越小,恢复时间越短。Ki取不同值时,母线电压波动幅值变化范围较小,恢复时间变化较为明显。
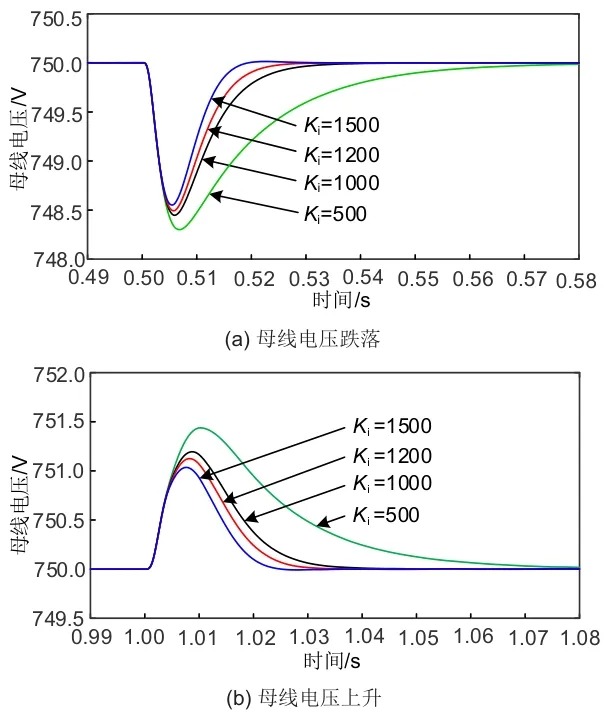
图9 Ki对母线电压波动影响
2.2 母线电压波动分析
直流微电网系统中功率发生波动时对其母线电压变化进行分析,其波形如图10所示。
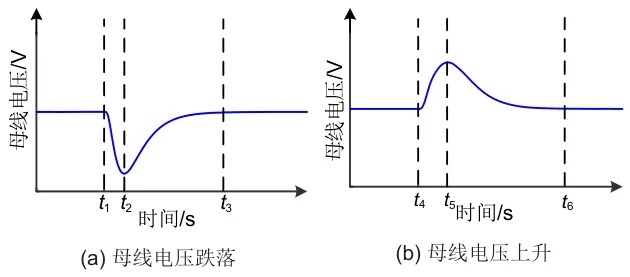
图10 母线电压动态响应分析
在直流微电网系统稳定运行时,负载功率突增或光照强度突减会导致母线电压跌落,其波形如图10(a)所示,可以分为3个阶段:稳定阶段,t1~t2跌落阶段,t2~t3恢复阶段。负载功率突减或光照强度突增会导致母线电压上升,其波形如图10(b)所示,可以分为3个阶段,稳定阶段,t4~t5上升阶段,t5~t6恢复阶段。在直流母线电压波动阶段,在t2与t5时刻分别达到母线电压跌落最大值与上升最大值。在t3与t6时刻恢复稳定。在实际工程中,希望母线电压跌落或上升幅值最小,恢复时间最短,即在t1~t2段跌落幅值、t4~t5段上升幅值越小越好,在t2~t3段、t5~t6段恢复稳定时间越短越好。按下述规律调节J、Kp和Ki,能够减小母线电压波动,使系统更稳定运行。
(1)在t1~t2、t4~t5阶段,虽然Kp和Ki增大可使母线电压跌落或上升幅值减小,但同时增大Kp和Ki可能引起系统不稳定。控制的快速性主要由比例决定,稳态性能主要由积分决定,因此,根据电压的偏差,增大比例系数Kp,并适当地减小积分系数Ki,减小转动惯量J,使电压的跌落或上升的幅值减小,并保证系统稳定。
(2)在t2~t3、t5~t6阶段,增大J,减小Kp,增大Ki,缩短直流母线电压恢复时间。
2.3 基于参数自适应的改进VDCM控制策略
根据上述分析,对J、Kp、Ki进行自适应控制策略研究,使系统功率发生波动时增强抑制母线电压波动的能力。由于阻尼系数D对母线电压波动影响较小,不再对D进行自适应控制。
转动惯量J按式(16)自适应调整:
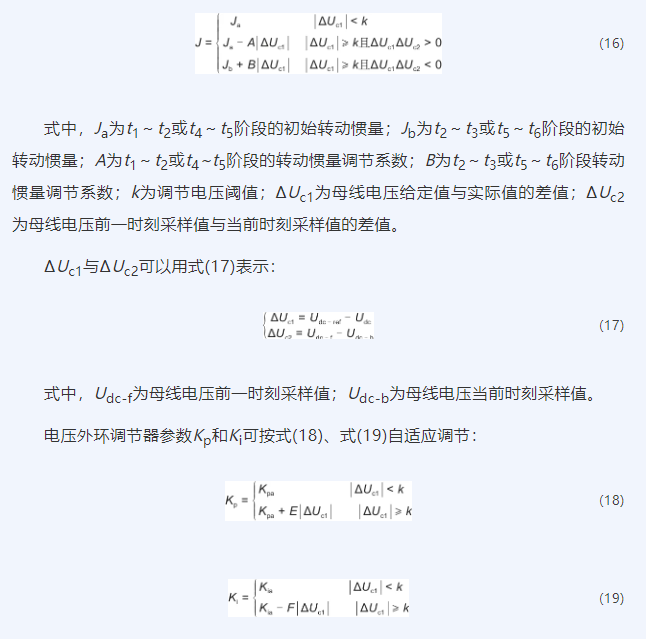
式中,Kpa、Kia分别为母线电压发生波动时初始电压外环比例系数与积分系数;E、F分别为母线电压波动时比例系数与积分系数的调节系数。
为避免转动惯量J的突变对母线电压造成影响,在J的调节器输出端加入低通滤波器,使其变化更加平滑。同时,为了避免J、Kp、Ki过大或过小对系统稳定性产生影响,分别设计最大值Kpmax=20、Kimax=2300、Jmax=0.12与最小值Kpmin=3、Kimin=1000、Jmin=0.0006对各参数进行限制。通常,在设计中,选择合理的A、B、E、F调节系数,使各调节参数在允许范围内变化,避免达到参数上下限。
虚拟直流电机J、Kp、Ki参数自适应控制策略框图如图11所示,J,Kp,Ki分别按式(16)、式(18)和式(19)计算,根据母线电压变化自适应调节,从而增强系统的惯性,减小直流母线电压的波动,改善其性能。
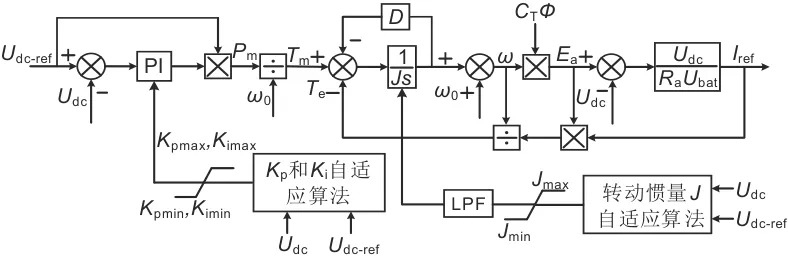
图11 基于参数自适应改进VDCM控制框图
3 仿真分析
3.1 仿真微网拓扑与参数
系统主电路结构如图12所示,由光伏系统、储能系统、直流负荷组成。储能系统补充或吸收直流母线上的缺额功率或剩余功率,保证直流母线电压的稳定与系统的功率平衡。
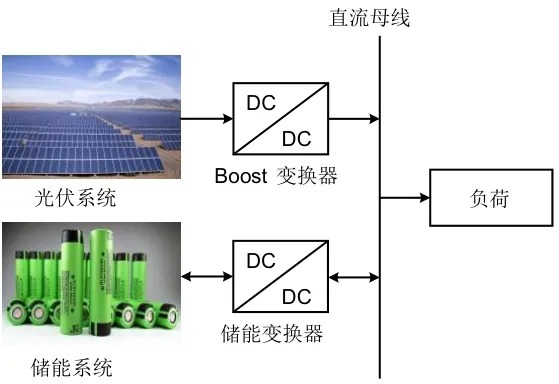
图12 直流微电网系统结构
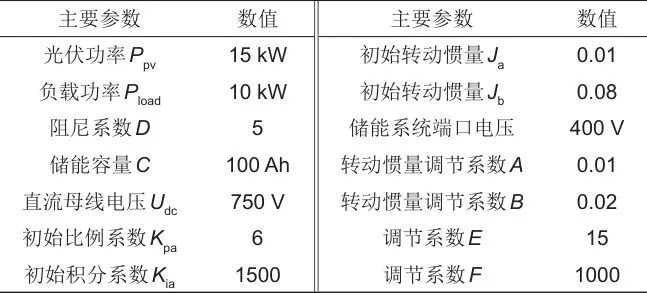
为了验证所提出控制策略的有效性,分别对传统双闭环控制策略、基于J自适应VDCM控制策略和基于参数自适应的改进VDCM控制策略进行了仿真,仿真参数见表1。
表1 仿真参数
3.2 三种控制策略仿真分析
仿真条件:光伏单元初始发出功率15 kW,负荷消耗功率7.5 kW,储能系统充电功率7.5 kW;在t=0.6 s时,光伏单元发出功率突减为5.2 kW,负荷消耗功率突增为10 kW,储能系统需放电4.8 kW;在t=1.2 s时,光伏单元发出功率突增为15 kW,负荷消耗功率突减为7.5 kW,储能系统充电功率7.5 kW。
(1)基于传统双闭环控制策略
传统双闭环控制仿真波形如图13所示。在0.6 s时,光伏功率突减和负载突增引起母线电压跌落,其跌落幅值为2.1 V,在0.78 s后恢复稳定。在1.2 s时,光伏功率突增和负载突减引起母线电压上升,其上升幅值为1.9 V,在1.39 s后恢复稳定。
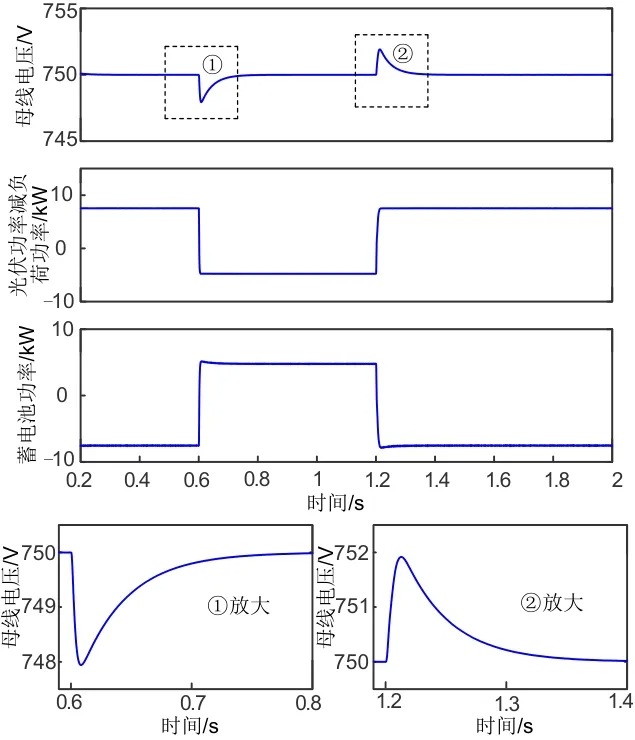
图13 传统双闭环控制仿真波形
(2)基于J自适应VDCM控制策略
基于J自适应的VDCM控制仿真波形如图14所示,其仿真条件与传统双闭环控制仿真条件一致。在0.6 s时,母线电压跌落幅值为1.7 V,在0.66 s后恢复稳定;在1.2 s时,母线电压上升幅值为1.4 V,在1.27 s后恢复稳定。J自适应的VDCM控制策略相较于传统双闭环控制策略,在减小了母线电压波动的同时,加快了电压的恢复速度。
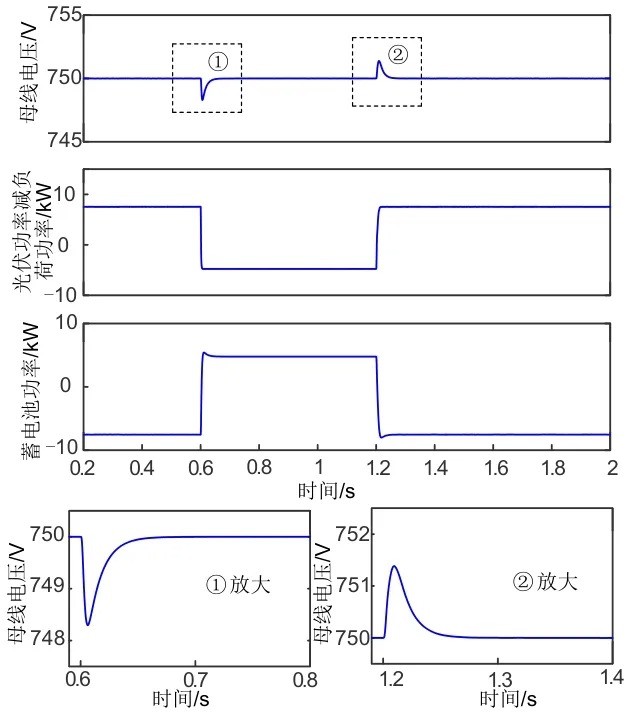
图14 基于J自适应改进VDCM控制仿真波形
(3)基于参数自适应的改进VDCM控制策略
基于J、Kp、Ki自适应的改进VDCM控制仿真波形如图15所示。在0.6 s时,母线电压跌落幅值为0.8 V,0.63 s后恢复稳定。在1.2 s时,母线电压上升,其上升幅值为0.6 V,1.23 s后恢复稳定。相较于基于J自适应的VDCM控制策略,在光伏和负载功率突变扰动下,该控制更好地稳定母线电压,缩短其恢复时间。
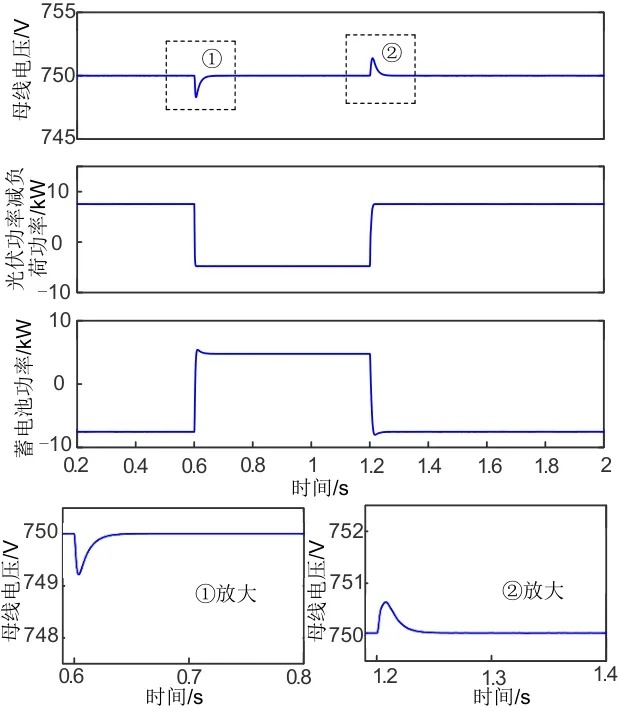
图15 基于参数自适应的改进VDCM控制策略仿真波形
3.3 三种控制策略下直流母线电压波动比较
传统双闭环控制、基于J自适应VDCM控制和基于参数自适应的改进VDCM控制在系统发生功率波动时,母线电压波动比较如图16所示。与传统双闭环、基于J自适应VDCM相比,J、Kp、Ki自适应VDCM控制降低了母线电压跌落或上升幅值,加快了母线电压恢复速度,减小了母线电压波动,增强了直流微电网系统稳定性。
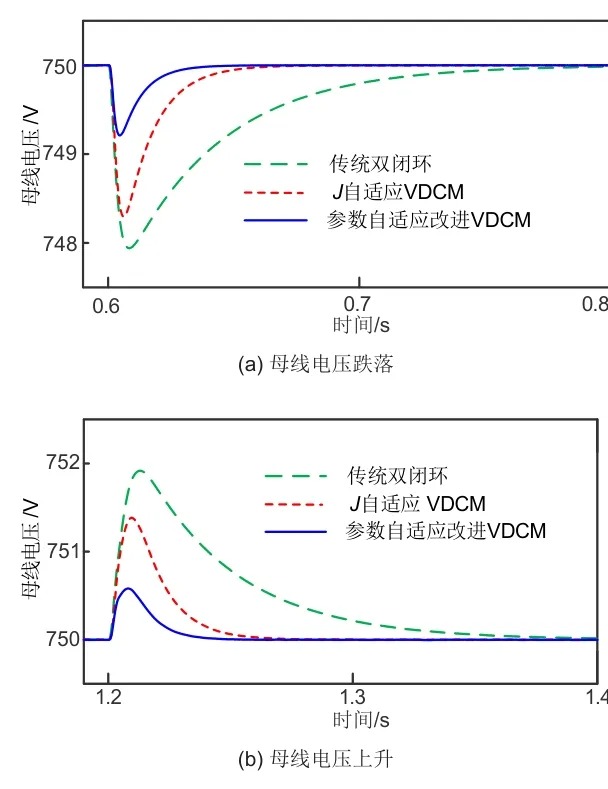
图16 母线电压波动仿真波形
4 实验结果及分析
基于实时数字仿真系统(RTDS)和快速控制原型(RCP)搭建硬件在环实验平台,如图17所示。
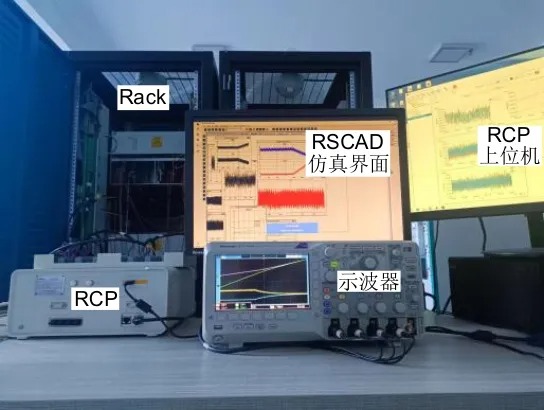
图17 基于RTDS与RCP的硬件在环实验平台
(1)基于传统双闭环控制
图18(a)为双闭环控制下直流母线电压下降实验波形,光伏减负载功率突减12.3 kW,母线电压发生跌落,跌落幅值为9 V,0.64 s后恢复稳定。图18(b)为直流母线电压上升实验波形,光伏减负载的功率突增12.3 kW引起母线电压上升,上升幅值为9 V,0.64 s后恢复稳定。
(2)基于J自适应的VDCM控制
实验条件与双闭环控制一致,直流母线电压实验波形如图19所示。电压跌落幅值为6 V,恢复时间为0.48 s;母线电压上升幅值为6 V,恢复时间为0.48 s。
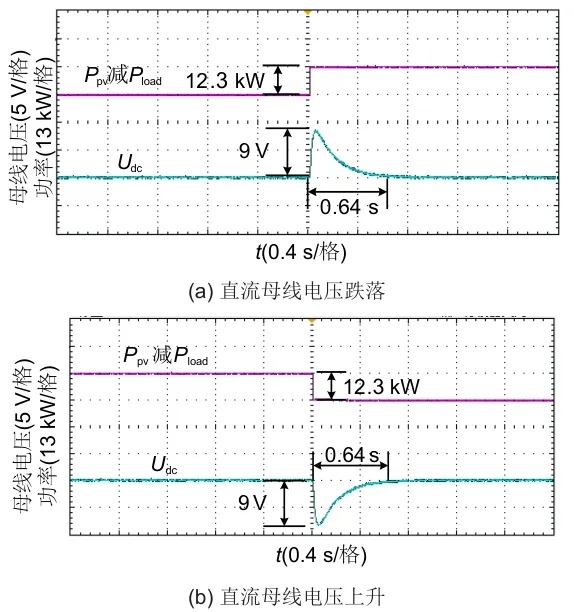
图18 双闭环控制实验波形
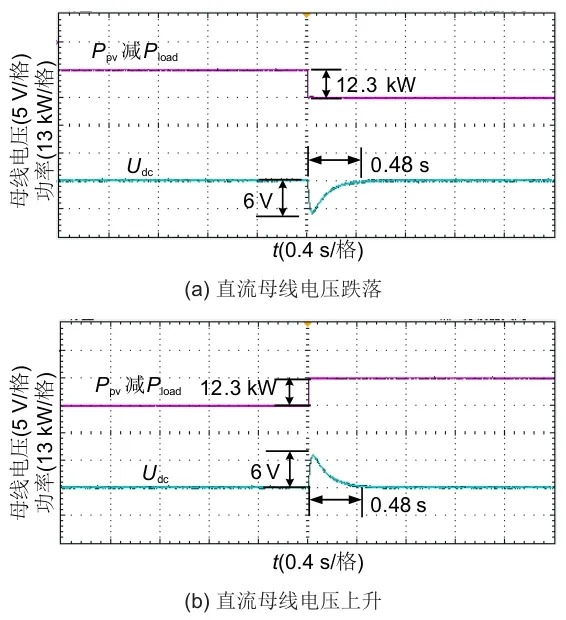
图19 基于J自适应VDCM控制实验波形
(3)基于参数自适应的改进VDCM控制
基于参数自适应改进VDCM控制的直流母线电压实验波形如图20所示,实验条件与前两种控制一致。由实验波形可以看出,母线电压跌落幅值为4 V,0.24 s后恢复稳定;母线电压上升幅值为4 V,0.24 s后恢复稳定。

图20 基于参数自适应改进VDCM控制策略实验波形
(4)三种控制策略实验结果比较
三种控制策略实验结果比较见表2。通过不同控制策略下的实验结果比较,进一步验证了改进的VDCM控制在系统功率发生波动时,能够更好地减小母线电压波动,增强系统惯性与稳定性。
表2 实验结果对比表

5 结论
在新能源发电量占比越来越高与直流微电网技术日益成熟的背景下,针对直流微电网中,分布式电源、负荷功率波动对母线电压造成影响的问题,本文研究了基于参数自适应的改进VDCM控制策略。建立了比例系数Kp、积分系数Ki、转动惯量J与电压偏差的关系式,搭建了仿真模型与实验平台,分别对传统双闭环控制、基于J自适应VDCM控制、基于参数自适应的改进VDCM控制策略进行了仿真和硬件在环实验,通过控制系统的小信号模型分析以及仿真与实验数据可以得到以下结论:①在储能控制系统中,引入虚拟直流电机控制,能够增强系统惯性与阻尼。②在母线电压波动时,本文研究的改进VDCM控制策略在转动惯量J自适应的基础上,加入电压外环调节器比例系数Kp与积分系数Ki自适应,能够根据母线电压变化,动态调节各控制参数,因此能够更好地抑制母线电压波动,缩短扰动恢复时间,提高母线电压的稳定性。通过实验数据,相比于传统双闭环控制策略,本文所研究的改进参数自适应控制策略,母线电压波动幅值减小55.6%,恢复稳定时间缩短62.5%;相比于J自适应VDCM控制策略,本文所研究的改进参数自适应控制策略,母线电压波动幅值减小33.3%,恢复稳定时间缩短50%。③通过三种控制策略的控制效果对比,改进VDCM控制策略能够增强系统的抗扰性,在实际应用中,能够增强电能质量。
资讯来源:储能科学与技术
免责声明: 本站内容转载自合作媒体、机构或其他网站的信息,转载此文仅出于传递更多信息的目的,但这并不意味着赞同其观点或证实其内容的真实性。本站所有信息仅供参考,不做交易和服务的根据。本站内容如有侵权或其它问题请及时告之,本网将及时修改或删除。凡以任何方式登录本网站或直接、间接使用本网站资料者,视为自愿接受本网站声明的约束。
